
| 品牌 | 其他品牌 | 产地类别 | 进口 |
|---|
LC-8120/8220是一款基于GPS的速度计,可以高精度测量车速和距离。
通过支持传统产品LC-8100A / 8200A不支持的GLONASS卫星,可以实现更稳定的测量。
此外,LC-8220天线(LC-0721)比LC-8200A天线(LC-0086)更小,更轻,更易于操作。
日本小野GPS车速表LC-8120 GPSLC-8220
GPS车速表
LC-8120
GPS矢量车速表
LC-8220
- 车速表相关产品组大纲
- 外观图下载(DWG / PDF)
- 产品目录(PDF)
- 特点
- 硬件
- 软件
- 选项
- 规范


LC-8120/8220是一款基于GPS的速度计,可以高精度测量车速和距离。
通过支持传统产品LC-8100A / 8200A不支持的GLONASS卫星,可以实现更稳定的测量。
此外,LC-8220天线(LC-0721)比LC-8200A天线(LC-0086)更小,更轻,更易于操作。
新天线(LC-0721)可以连接到传统产品LC-8200(A)上并进行测量。
通过使用可选的高精度IMU,连接到主单元的IMU(惯性测量单元)可以改善加速度和角速度的线性度。
此外,通过增加高响应IMU模拟输出功能(选项),可以将IMU数据的模拟输出频率从100 Hz增加到500 Hz。
在其他功能方面,除了传统功能外,还可以增加白线检测功能(LC-0856),加加速度测量功能(LC-0871)和平均减速度计算(LC-0831)选项,并可以进行更多的车辆测试。你可以回复
特点
-
除GPS卫星外,还支持GLONASS卫星
-
由于天线(LC-0721)小而薄,即使安装在车顶上,对行驶阻力的测量和车辆行为的测量也几乎没有影响
-
IMU(惯性测量单元)可以将角速度的线性度从±0.1%/ FS改为±0.03%/ FS(可选)
-
通过高响应IMU模拟输出功能(选项),模拟输出频率可在100Hz至500Hz之间变化
-
可以添加白线检测功能,加速度测量功能,平均减速度计算等新选项
-
一个单元可以测量超过30个项目,包括线速度,横向速度,侧滑角,斜率等选项(LC-8120是可选的)
-
可输入8个模拟信号和5个脉冲信号(LC-8120可选)
-
从采集数据中选择16ch模拟输出,如3轴加速度,倾斜角等等(LC-8220)
-
CAN数据采集(可选)
-
当卫星丢失时,可以通过LED和蜂鸣器进行识别
-
基于可追溯系统图的校准可能(可追溯系统图,测试报告,校准证书可提交)
-
用于各种车辆测试的软件选项,例如加速和减速测试
-
通过添加选项,LC-8120可升级至LC-8220等效物
LC-8120视频介绍(YouTube)
高精度数据测量
一般来说,GPS测量纬度和经度,但LC-8000系列很高,因为它不仅通过纬度和经度信息测量移动物体的速度,而且还测量从卫星和移动物体发送的无线电波的多普勒效应。可以测量精度数据。

通过无线电波的多普勒效应实现对速度和距离数据的高精度测量。
稳定的测量
通常,当单独使用GPS测量速度时,它取决于卫星采集状态,但LC-8000系列使用IMU(惯性测量单元)并且不受其采集状态和稳定测量的影响有可能。

LC-8120

<LC-8120 + LC-0850A通用I / O单元的组合示例>

LC-8220

可选功能(图标说明)
LC-8220 标准安装 / LC-8120 选件
LC-8120/8220两种选择


LC-8220可以输入背面D-Sub
可以输入8个模拟通道和5个通道或更多通道。
数据可以记录在PC上。
输入电压范围为0至±10 V,0至±20 V.
LC-8120需要LC-0850A(通用输入/输出单元)。

 用于将主机测量的数据输出为模拟电压的功能。输出电压高达10 V.
用于将主机测量的数据输出为模拟电压的功能。输出电压高达10 V.
从许多数据和输出中选择16个通道。
此外,速度模拟输出作为标准配置。
在LC-8120中,需要选件LC-0850A(通用输入/输出单元)。
※照片显示LC-8220
上模拟输出,可选
下模拟输出,标配速度模拟输出

CAN通信数据可以导入主机。符合CAN Ver 2.0B标准。多32个频道。LC-8120和LC-8220都需要选件LC-0851(CAN输入功能)。

主单元测量的数据通过CAN通信输出。输出周期长为10 ms。符合CAN Ver 2.0B标准。将set ID等的内容输出到CANdb文件。LC-8120和LC-8220都需要选件LC-0811A(CAN输出功能)。

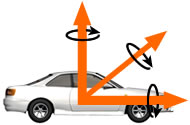 它可以测量IMU(惯性测量单元)的XYZ轴方向上的加速度,角速度和角度信息。对于LC-8120,需要选件LC-0821(IMU数据输出功能)。
它可以测量IMU(惯性测量单元)的XYZ轴方向上的加速度,角速度和角度信息。对于LC-8120,需要选件LC-0821(IMU数据输出功能)。
 GPS高度数据和IMU Z轴数据可以进行垂直测量。垂直操作也是可能的。
GPS高度数据和IMU Z轴数据可以进行垂直测量。垂直操作也是可能的。
LC-8120:选件LC-0822(垂直方向测量功能)支持的LC-8200:标准规格

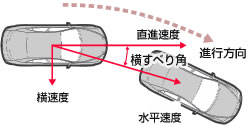
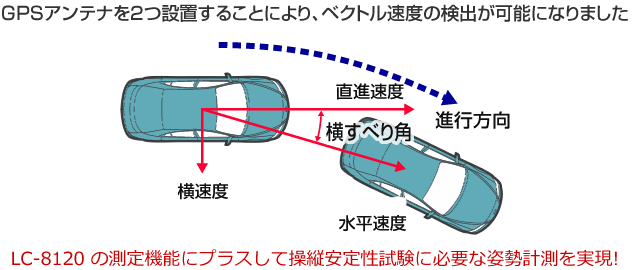
通过用两个天线定义车辆的行进方向,还可以测量车辆自身的方向。在LC-8120中,需要选件LC-0823(矢量测量功能)。

※可以在软件中更改设置画面上的km / mile。
将测量单位从千米切换到千米。LC-8120和LC-8220都需要选件LC-0820(公里/英里切换功能)。

可以进行±0.03%/ FS或更低角速度线性度的高精度测量。
(标准IMU为线性±0.1%/ FS)
LC-8120/8220需要可选的LC-0855(高精度IMU)。


在LC-8220(上级)或LC-0850A输出的电压输出中,此功能用于输出3轴加速度和500 Hz更新的角速度数据。此功能与标准附加IMU(LC-0087)和可选的高精度IMU(LC-0855)兼容。
标准软件包含(第3版)功能



软件(版本3)选项功能
功能软件分类
|
数据记录功能 LC-0833 LC-0832 LC-0831加速 |
|
|---|---|
|
● 时间序列记录数据的采样频率为100 Hz。 ● 通过引入可选软件可以记录项目。(详情请查看规格表) |
|
|
多重测试功能 LC-0832 LC-0831加速 |
|
|
● 测量顺序1数据由就绪→开始→停止创建。在经常重复Ready→Start→Stop的测试中,管理生成的数据非常重要。多重测试功能在数据管理器中管理多个测试结果。您还可以一目了然地查看考试之间的差异。
|
|
|
CAN输入功能 LC-0851 |
CAN输出功能 LC-0811A |
|
●可以加载CAN数据 ●采样率高达100 Hz ●可以导入CANdb文件,并且可以轻松注册测量和记录通道 |
●可以输出CAN数据 ●输出采样高达100 Hz ● CANdb文件生成功能可以轻松连接CAN记录设备 |
|
方向识别功能 LC-0832 LC-0831加速 |
|
|
●执行多个测试时可以设置的功能 ●在驾驶考试中需要双向行驶时使用 ●将记录数据划分为A路线和B路线,并通过预先设定车辆的行驶方向来组织结果 ●我们可以显示每个课程的平均值
|
|
|
划分惯性测试功能 LC-0831加速 |
|
|
●设置了飞行测试,多重测试和方向识别功能时可能出现的功能 ●通过预先设置分区编号和测试开始速度自动启动和停止测试 ●统一显示多次收集的数据
|
|
|
行驶路径车辆行驶方向指示 LC-0823 LC-8220 |
|
|
●在显示行驶轨迹的同时,显示车体的行驶方向,行驶方向 ●需要 LC-8220或矢量测量来显示车辆行驶方向
|
|

LC-8120 / LC-8220测量项目对比表
○:标准::选项X:无法衡量
| 主要项目 | 测量/ PC数据记录 | |
|---|---|---|
| LC-8120 | LC-8220 | |
| 水平速度和距离 | ○ | ○ |
| 直线速度和距离 | △ ※1 | ○ ※5 |
| 横向速度,距离 | △ ※1 | ○ ※5 |
| 垂直速度和距离 | △ ※2 | ○ |
| 梯度 | △ ※2 | ○ |
| 卫星数量 | ○ | ○ |
| 标题 | ○ | ○ |
| 纬度,经度,海拔高度 | ○ | ○ |
| 侧滑角 | △ ※1 | ○ ※5 |
| 偏航,俯仰,滚转角度 | ○ ※3 | ○ |
| XYZ加速度和角速度(IMU坐标轴) | ○ ※3 | ○ |
| XYZ加速度,角速度(车辆坐标轴) | ○ ※4 | ○ |
| 车辆姿态角 | △ ※1 | ○ ※5 |
| XYZ加速度 | △ ※6 | △ ※6 |
※1 LC-0823可通过添加矢量测量功能
※2可通过添加LC-0822垂直测量功能
※3可通过添加 LC-0821 IMU数据输出功能
※4 LC-0821 IMU数据输出功能和LC- 0823可能增加矢量测量功能
* 5无法使用1个天线
* 6 LC-0871可以增加加速度测量功能
规范
| LC-8120 GPS车速表 | LC-8220 GPS矢量车速表 | ||
|---|---|---|---|
| 更新频率 | 100赫兹 | ||
| 水平速度 | 测量范围 | 0.1至500.0公里/小时 | |
| 准确性 | ±0.1 km / h * 1 | ||
| 水平距离 | 准确性 | ±0.05%* 2 | |
| 直速 | 测量范围 | – (适用于LC-0823) | -500.0至500.0公里/小时 |
| 准确性 | ±0.2 km / h * 3 | ||
| 直线距离 | 准确性 | ±0.1%* 4 | |
| 横向速度 | 测量范围 | -20.0至20.0米/秒 | |
| 准确性 | ±0.08 m / s * 5 | ||
| 水平距离 | 准确性 | ±0.15%* 6 | |
| 侧滑角 | 测量范围 | -25.0至25.0° | |
| 准确性 | 0.15°RMS * 7(参考精度) | ||
| 车辆姿态角 | 测量范围 | -180.0至180.0° | |
| 准确性 | 0.1°RMS * 8(参考精度) | ||
| 偏航角 | 测量范围 | – (适用于LC-0821 | -180.0至180.0° |
| 准确性 | 0.1°RMS * 8(参考精度) | ||
| X,Y,Z 加速度 |
测量范围 |
-98.0至98.0 m / s 2 【-49.0至49.0 m / s 2 * 9】 |
|
| 线性 |
±0.2%/ FS [±0.1%/ FS * 9 ] |
||
| X,Y,Z 角速度 |
测量范围 | -150.0至150.0°/ s | |
| 准确性 |
±0.1%/ FS 【±0.03%/ FS * 9】 |
||
| 模拟 (速度) 输出 |
电压范围 | 0至10 V / 0至500 km / h(可使用附带的软件更改) | |
| 输出精度 | ±0.2%/ FS | ||
| 负载电阻 | 100kΩ或更高 | ||
| 温度稳定 | ±0.05%/ FS /°C | ||
| 输出延迟 | 在5毫秒内 | ||
| 脉冲 (距离) 输出 |
决议 | 1,5,10 mm / P可切换 | |
| 输出延迟 | 在5毫秒内 | ||
| DUTY | 50%±10% | ||
| 负载电阻 | 10kΩ或更高 | ||
| 输出信号 | 方波脉冲输出:Hi 5±0.5 V Lo 0.5 V或更低 | ||
| 任意 模拟 输出 |
项目 | – (适用于LC-0850A) | 水平速度,直线速度,横向速度,垂直速度,卫星数量,航向,北速,东速,侧滑角,偏航角,俯仰角,侧倾角,IMU坐标轴XYZ加速度,IMU坐标轴XYZ角速度,坡度角 16ch选自卫星丢失标志,车辆坐标轴XYZ加速度,车辆坐标轴XYZ角速度,车辆姿态角度,IMU坐标轴XYZ加加速度 |
| 输出电压 | -10.0至10.0 V(可通过PC软件更改) | ||
| 偏移错误 | 在±5 mV以内 | ||
| 输出精度 | ±0.1%/ FS | ||
| 温度稳定 | ±0.02%/ FS /°C | ||
| 更新频率 | 100 Hz / 500 Hz * 10 | ||
| 负载电阻 | 100kΩ或更高 | ||
| 输出延迟 | 在5毫秒内 | ||
| 外部 同步 输出 |
功能 | 同步脉冲/异步时钟输出 | |
| 输出水平 | 方波脉冲输出:高5±0.5 V, 低0.5 V或更低 |
||
| DUTY | 在同步脉冲输出时:Hi为 50%±10%,大约100μs 异步时钟输出 |
||
| 输出频率 | 100赫兹 | ||
| 负载电阻 | 10kΩ或更高 | ||
| 模拟输入 | 频道数量 | 8 ch | |
| 电压范围 | ±10 V / 20 V. | ||
| 采样频率 | 100赫兹 | ||
| 抵消 | 在±20 mV以内 | ||
| 测量精度 | ±0.5%/ FS | ||
| 脉冲输入 | 频道数量 | 4 ch:TTL脉冲1 ch:SIN输入 | |
| 转变 | 4 ch TTL: 从脉冲计数/频率/占空比中选择1 ch SIN输入:频率 |
||
| 频率范围 (4ch TTL) |
脉冲计数:DC至50 kHz 频率:1 Hz至50 kHz 占空比:1 Hz至10 kHz |
||
| 频率范围 (1通道SIN) |
频率:1 Hz至50 kHz | ||
| 精度 (4ch TTL) |
脉冲计数:±1计数内 频率:输入频率×0.02%在±1 Hz范围内, 占空比转换:1 kHz或更低;±2%或更低 1 kHz或更高;±6%或更低 |
||
| 精度 (1ch SIN) |
频率:输入频率×0.02%±1 Hz或更低 | ||
| 电源输出 | DC12±2V(约4VA内)×1ch | ||
| 外部触发 输入/输出 |
输入 |
非电压触点输入:1ch触点(逻辑可切换) 电压输入:5至24 V输入(逻辑可切换) 白线检测传感器输入 |
|
| 产量 | 门输出:1ch门ON / OFF,方波脉冲输出,负载电阻39kΩ以上 | ||
| PC界面 | USB 2.0 | ||
| 一般规格 | 使用电源 | DC 10至28 V / AC 100至240 V(使用AC适配器时:可选) | |
| 功耗 | 高达30 VA | ||
| 工作温度范围 | 0至50°C | ||
| 储存温度范围 | -10至60°C | ||
| 附件 | 天线(LC-0721), 遥控盒(LC-0083), Phoenix连接器, IMU(LC-0087)和各连接电缆, DC电源线,USB线, PC标准软件,使用说明书 |
天线(LC-0721)X 2,大显示屏(LC-0084),遥控盒(LC-0083),Phoenix连接器,IMU(LC-0087)和每根连接线,DC电源线,USB线,PC标准软件,用于IMU安装的天线和磁片,说明书 | |
| 尺寸(质量) | 约269(宽)x 180(深)x 43(高)毫米(不包括突起) (约1.4千克) |
约269(宽)x 180(长)x 71(高)毫米(不包括突起) (约2.2公斤) |
|
| 否则 | 选项 | 雪茄插座电源线(LC-0730A),挡风玻璃附件(LC-0740), 数字打印机(DPU-414),磁带开关,便携包(LC-0813A) |
|
| 电脑 操作推荐环境 |
操作系统:Windows®10/ 7 [32/64位],内存:512 MB或更多, HDD:80 GB或更多,CPU:Intel Core 2 Duo / 2 GHz或更高, USB:USB 2.0(高速)1端口或更多 屏幕分辨率:PC操作环境中的XGA(1024 x 768)或更高
|
||
* 1:水平速度为30 km / h以上,卫星采集数为7以上的精度。
* 2:测量距离为300米,水平速度为30 km / h或更高,卫星采集数为7或更高时的精度。当卫星数量小于7且没有多径时,±0.5%
* 3:当天线之间的距离为2米且水平速度为100千米/小时时,使用七颗或更多颗卫星时的精度。当天线之间的距离为2米且水平速度为100千米/小时时。当卫星数量为4或更多时,±0.8 km / h。
* 4:当天线之间的距离为2米且水平速度为100千米/小时时,使用七颗或更多颗卫星时的精度。当天线之间的距离为2米,水平速度为100千米/小时。当卫星数量为4或更多时,±0.70%
* 5:当天线之间的距离为2米且水平速度为100千米/小时时,使用七颗或更多颗卫星时的精度。当天线之间的距离为2 m且水平速度为100 km / h且卫星数量为4或更多时,为±0.20 m / s
* 6:当天线之间的距离为2米且水平速度为100千米/小时时,使用七颗或更多颗卫星时的精度。当天线之间的距离为2 m且水平速度为100 km / h且卫星数量为4或更多时,为±0.65%
* 7:天线之间的距离为2米,水平速度为30千米/小时或更高,卫星为7或更高时的精度。当天线之间的距离为2 m时,水平速度大于30 km / h,卫星数量为4或更多,0.30°RMS
* 8:当天线之间的距离为2米且有七颗或更多颗卫星时的准确度。当天线之间的距离为2 m且卫星数量为4或更多时,±0.2°RMS
* 9:安装LC-0855高精度IMU选件时。
* 10:安装高响应输出选项时,仅支持模拟输出。
*Windows®10和Windows®7是Microsoft Corporation在美国和其他国家/地区的注册商标或商标。
*英特尔®酷睿™是英特尔公司在美国和其他国家/地区的商标。
* 11:在Windows®10中,您需要连接到网络并进行安装。
可选产品规格
| 产品名称(类型名称) | 通用输入/输出单元(LC-0850A) | ||
|---|---|---|---|
| 任意 模拟 输出 |
项目 | 水平速度,直线速度,横向速度,垂直速度,卫星数量,航向,北速,东速,侧滑角,偏航角,俯仰角,侧倾角,IMU坐标轴XYZ加速度,IMU坐标轴XYZ角速度,坡度角 16ch选自卫星丢失标志,车辆坐标轴XYZ加速度,车辆坐标轴XYZ角速度,车辆姿态角度,IMU坐标轴XYZ加加速度 |
|
| 输出电压 | -10.0至10.0 V(可通过PC软件更改) | ||
| 抵消 | 在±5 mV以内 | ||
| 输出精度 | ±0.1%/ FS | ||
| 温度稳定 | ±0.02%/ FS /°C | ||
| 更新频率 | 100赫兹 | ||
| 负载电阻 | 100kΩ或更高 | ||
| 输出延迟 | 在5毫秒内 | ||
| 外部 同步 输出 |
功能 | 同步脉冲/异步时钟输出 | |
| 输出水平 | 方波脉冲输出:高5±0.5 V,低0.5 V或更低 | ||
| DUTY | 在同步脉冲输出时:Hi为 50%±10%,大约100μs 异步时钟输出 |
||
| 输出频率 | 100赫兹 | ||
| 负载电阻 | 10kΩ或更高 | ||
| 模拟输入 | 频道数量 | 8 ch | |
| 电压范围 | ±10 V / 20 V. | ||
| 采样频率 | 100赫兹 | ||
| 抵消 | 在±20 mV以内 | ||
| 测量精度 | ±0.5%/ FS | ||
| 脉冲输入 | 频道数量 | 4 ch:TTL脉冲1 ch:SIN输入 | |
| 转变 | 4 ch TTL:从脉冲计数/频率/占空比中选择1 ch SIN输入:频率 |
||
| 频率范围 (4ch TTL) |
脉冲计数:DC至50 kHz 频率:1 Hz至50 kHz 占空比:1 Hz至10 kHz |
||
| 频率范围 (1通道SIN) |
频率:1 Hz至50 kHz | ||
| 精度 (4ch TTL) |
脉冲计数:±1计数内 频率:输入频率×0.02%在±1 Hz范围内 工作转换:1 kHz或更低;±2%或更低,1 kHz或更高;±6%或更低 |
||
| 精度 (1ch SIN) |
频率:输入频率×0.02%±1 Hz或更低 | ||
| 电源输出 | DC12±2V(约4VA内)×1ch | ||
| 物理尺寸 | 约269(宽)x 180(长)x 43(高)毫米(不包括突起) | ||
| 产品名称(类型名称) | IMU惯性测量单元(LC-0087) | ||
|---|---|---|---|
| X,Y,Z加速度 | 线性 | 0.2%/ FS(参考精度) | |
| 测量范围 | ±98 m / s 2(参考精度) | ||
| X,Y,Z角速度 | 线性 | 0.1%/ FS(参考精度) | |
| 测量范围 | ±150°/ s(参考精度) | ||
| 电缆 | 5米 | ||
| 防护等级 | IP43 | ||
| 尺寸(质量) | 约56(W)x 56(D)×35(H)mm(不包括突起)(约110克/当安装磁铁基座时:约250克) | ||
| 产品名称(类型名称) | 遥控盒(LC-0083) |
|---|---|
| 功能 | 测试开始/结束命令,清除显示 |
| SW | START,STOP,RESET,SELECT / READY |
| 尺寸(质量) | 大约115(宽)x 45(深)x 20(高)mm(不包括突起)(约80 g) |
| 产品名称(类型名称) | CAN输入功能(LC-0851) |
|---|---|
| 标准 | 符合2.0B版 |
| 更新频率 | 100赫兹 |
| 波特率 | 选择125,250,500和1000 kbps |
| 格式 | 标准ID /扩展ID支持 |
| 数据 | CAN输入:多可以获取32个通道 OBD II协议可以获取多10项指定的测量值 |
| 附件 | D-Sub 9针连接器 |
| OBD II数据采集功能 | 使用CAN输入端口的数据采集 限制(端口A:31ch / 32ch) : 1。启用OBD II数据采集功能时,CAN输入端口A的数据采集数为30ch 2。尽管符合SAE J 1979,但如果通信协议根据型号(车型)或发动机型号而不同,则无法获取数据 |
| 产品名称(类型名称) | CAN输出功能(LC-0811A) |
|---|---|
| 标准 | 符合2.0B版 |
| 更新频率 | 选择OFF / 1 Hz / 5 Hz / 10 Hz / 20 Hz / 100 Hz |
| 波特率 | 选择125,250,500和1000 kbps |
| 格式 | 标准ID /扩展ID支持 |
| 数据 | 在一个ID中汇总速度,距离和卫星等信息。(ID可以任意设定) |
| 附件 | D-Sub 9针连接器,CAN分支电缆(LC-0862) |
| 产品名称(类型名称) | 小显示屏(LC-0080) | 大显示屏(LC-0084) |
|---|---|---|
| 显示方法 | 荧光显示管(绿色) | |
| 功能 | 显示设置,测试开始/结束命令,存储器命令 速度,距离,卫星获取信息显示,简单测试结果显示 1步/ 2步显示切换等显示模式设置可用。 输出命令到DPU-414打印机。 |
|
| 附件 | 电缆 | |
| 选项 | 挡风玻璃安装附件(LC-0740) | – |
| 尺寸 (质量) |
大约144(W)x 41(D)x 66(H)mm(不包括突起) (约300 g) |
大约196(W)x 50(D)x 60(H)mm(不包括突起) (约450 g) |
| 产品名称(类型名称) | 输入连接器盒(LC-0815) | 输出连接器盒(LC-0819) |
|---|---|---|
| 功能 | 将外部I / O功能单元的D-Sub 输入连接器转换为BNC | 将外部I / O功能单元的D-Sub 输出连接器转换为BNC |
| 连接器 | BNC x 16,D-Sub 37针x 1 | |
| 附件 | D-Sub电缆 | |
| 尺寸(质量) | 大约230(宽)x 100(长)x 28(高)毫米(约750克) | |
| 产品名称(类型名称) | GPS / GLONASS天线(LC-0721) |
|---|---|
| 电缆长度 | 大约5米 |
| 工作温度范围 | -40至85°C |
| 防护等级 | IP67 |
| 尺寸 (质量) |
φ57(D)×15(H)mm (约110 g(不含电缆)) |
| 产品名称(类型名称) | 白线检测传感器(LC-0856) |
|---|---|
| 电源电压(电流消耗) | 12至24 V DC(30 mA或更低) |
| 光源 | 红色半导体激光器(波长655 nm) |
| 发光输出 | 0.5 mW或更低 |
| 检测距离 | 0.2至1.5米 |
| 激光光斑直径 | 约6 x 4毫米(距离小于1米) |
| 电缆长度 | 大约5米 |
| 反光板 | 使用附加的反射片(1米x 2) |
| 工作温度范围 | 0至50°C |
| 防护等级 | IPX3 |
|
外形(质量) |
大约300(W)x 40(D)x 45(H)mm(约350 g(我们不包括电缆)) |
其他选择
| LC-0730A 点烟器 电源线 |
LC-0740挡风玻璃 安装 附件 |
0813-LC甲 手提箱 |
|---|---|---|
 |
 |
 |
| LC-0856 白线检测传感器 |
PE1704174 磁带开关 |
DPU-414 数字打印机 |
|---|---|---|
  |

※铅的颜色可能不同,但性能没有差异 |
 |
日本小野GPS车速表LC-8120 GPSLC-8220 日本小野GPS车速表LC-8120 GPSLC-8220
日本小野全国总代理,日本佐藤总代理,日本三丰总代理,日本柴田总代理,日本精工总代理,日本尼康总代理,日本码科泰克总代理。